On-going Project
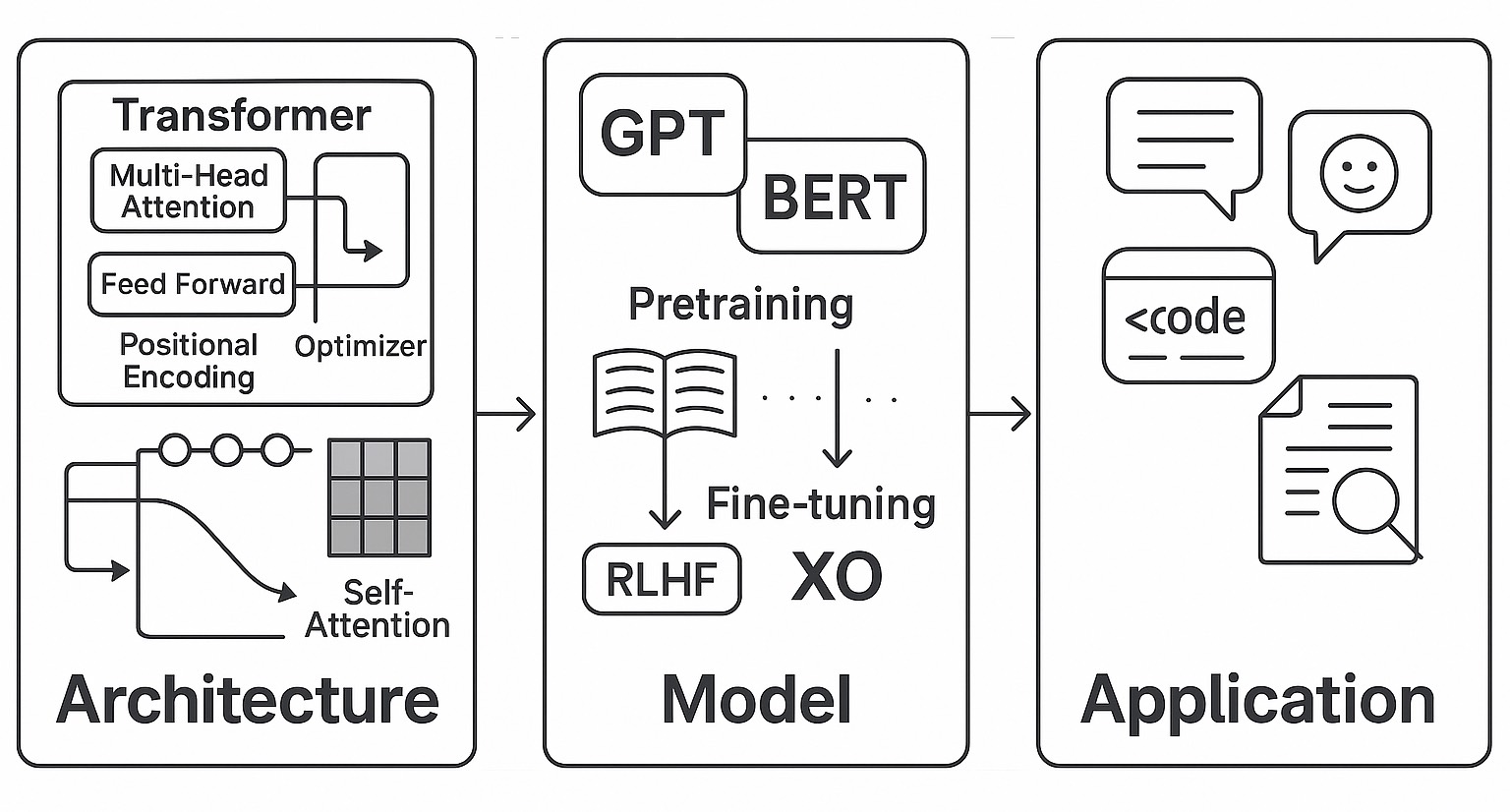
Research for Large Language Models
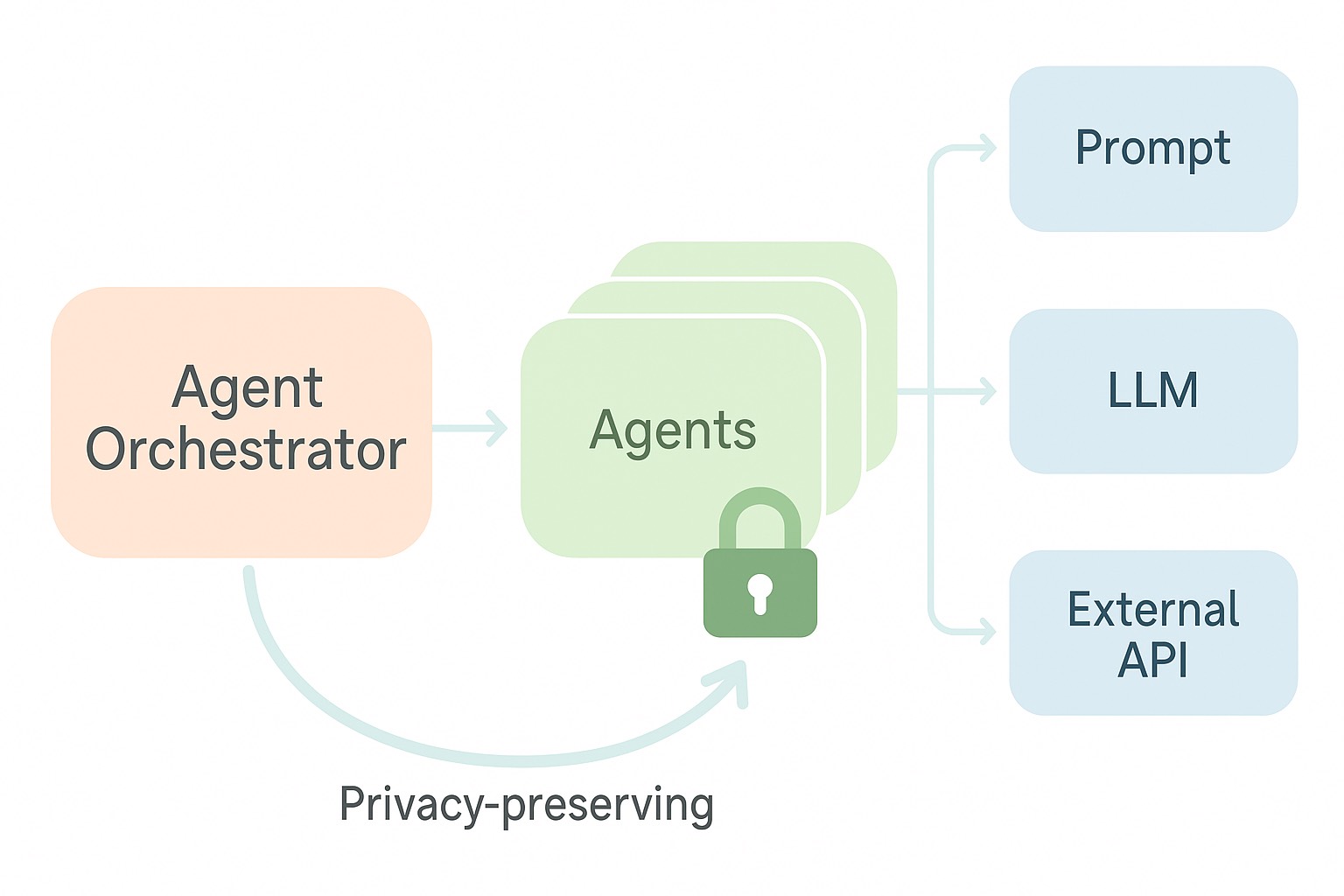
Development of Privacy-Preserving Multi-Agent LLMs Applications
Development of Edge-Optimized Vision / Language Models
Development of SLAM Technology for Spatial Recognition in Robots
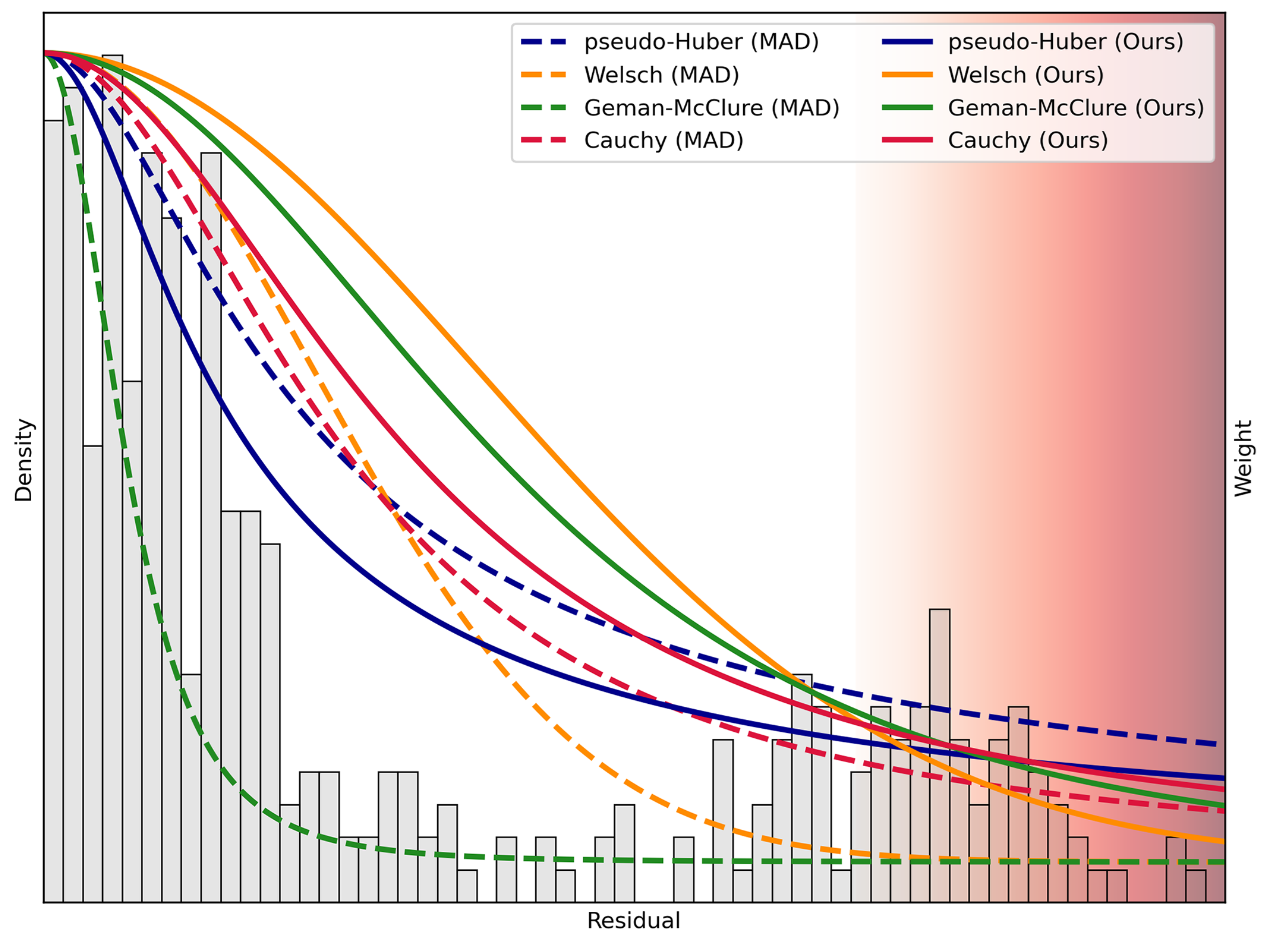
Probabilistic Kernel Optimization for Robust State Estimation
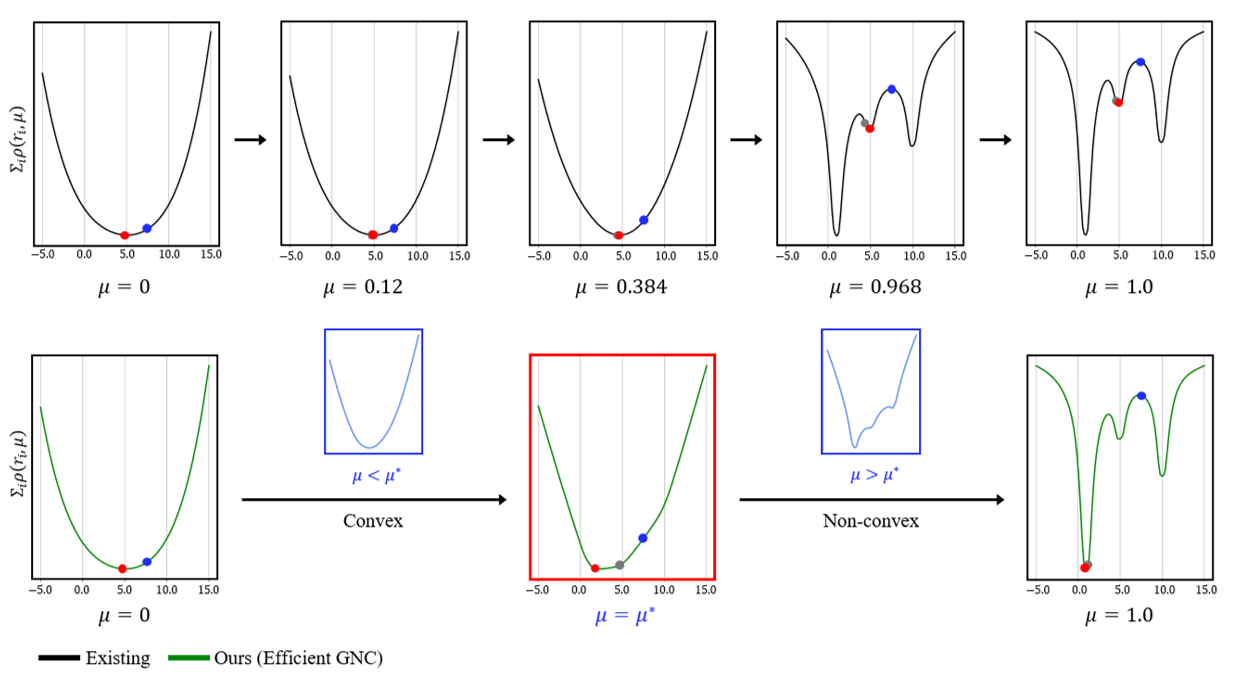
Graduated Non-Convexity for Pose Graph Optimization
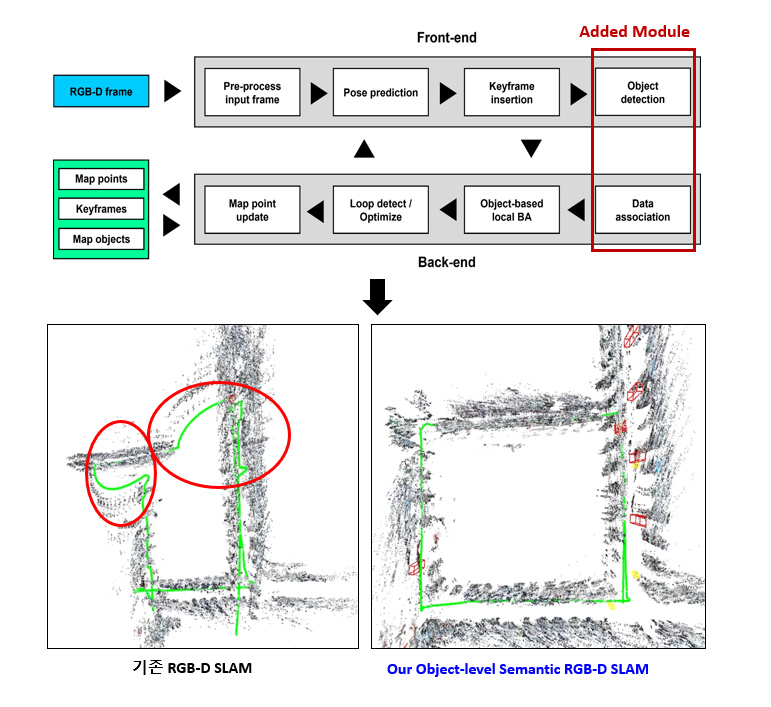
Object SLAM
DLLAB BOT
| Robot Platform | Clearpath Jackal UGV |
| Rotating LiDAR | Ouster OS-1 128 Rev. 6 / Velodyne VLP-16 |
| Solid-State LiDAR | LSlidar CH128X1 |
| RGB-D Camera | Intel RealSense D-455 / ORBBEC Gemini 336L / StereoLabs Zed 2i / Luxonis OAK-D Pro |

Development of Multimodal Object Recognition Technology for Navigation Assistance

Development of Weather Routing for Economic Shipping

Development of Reinforcement Learning Algorithm for Safe Navigation in Coastal Area
